
Houdini vex connect all points
Houdini vex connect all points
A bit of an exercise of making a wrangle version of ‘connect adjacent points’, to give myself more control.
Connecting different named points is possible like this:
So I decided to explore having more control in vex, using a point wrangle:
// target index is the geo at input 1
int target_index = 1;
// for each point, find all nearpoints on input 1, store in array
int near_pts[] = nearpoints(target_index, @P, chf('maxdist'));
foreach (int near_pt; near_pts) {
// randomly decide to skip this combination of ptnum and pt
if (rand(near_pt + @ptnum + chf('seed')) < chf('random_cull')) {
continue;
}
// get position of the found point
vector found_pos = point(target_index, 'P', near_pt);
// create new point on this geo from the found one
int found_point = addpoint(0, found_pos);
// create new prim from this point to newly created point
int new_prim = addprim(0, 'polyline', @ptnum, found_point);
}
note that these lines skip some connections for a quick way to vary, or not generate so much!
// randomly decide to skip this combination of ptnum and pt
if (rand(pt + @ptnum + chf('seed')) < chf('random_cull')) {
continue;
}
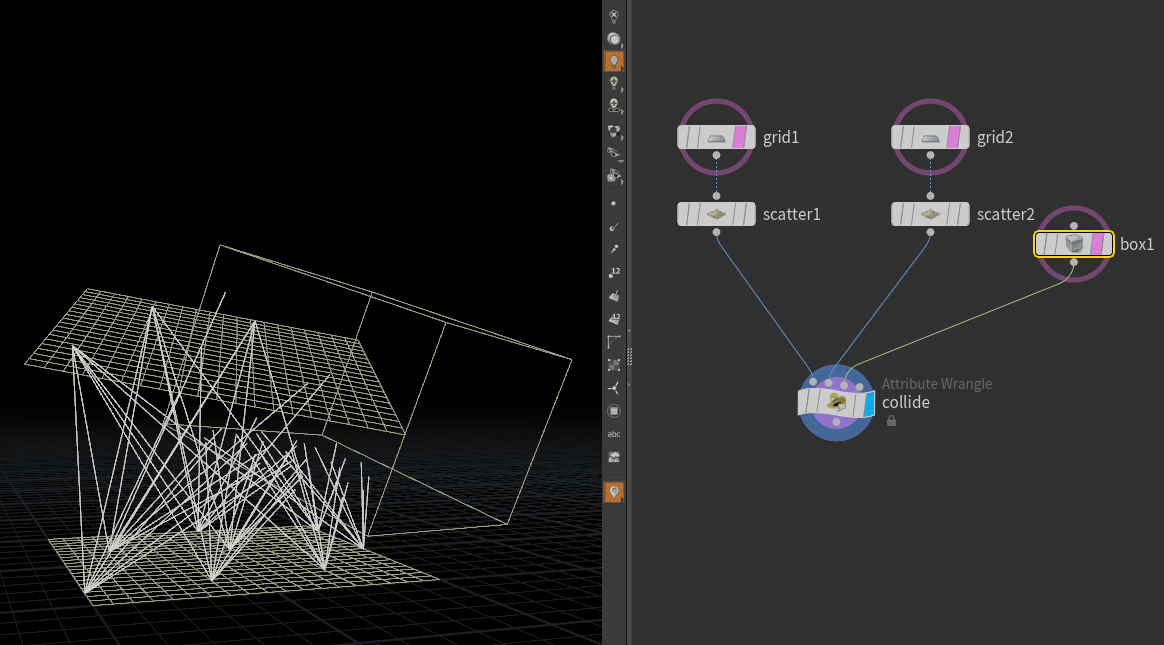
Collide with intersection geometry
Additionally with geo plugged into the third input we can check if it is blocking connections and end them at that stage instead.
// target index is the geo at input 1
int target_index = 1;
int collision_index = 2;
// for each point, find all nearpoints on input 1, store in array
int near_pts[] = nearpoints(target_index, @P, chf('maxdist'));
foreach (int near_pt; near_pts) {
// randomly decide to skip this combination of ptnum and pt
if (rand(near_pt + @ptnum + chf('seed')) < chf('random_cull')) {
continue;
}
// get position of the found point
vector found_pos = point(target_index, 'P', near_pt);
// get direction from point to its foundpoint
vector dir = normalize(found_pos - v@P) * 10.0;
// init variables
vector intersect_pos;
vector intersect_uvw;
// find intersection with collision geo along direction from point
int intersected = intersect(collision_index, v@P, dir, intersect_pos, intersect_uvw);
int found_point;
// if there was no collision
if (intersected == -1) {
// create new point from other geo
found_point = addpoint(0, found_pos);
}
else {
// instead use the interesect point
found_point = addpoint(0, intersect_pos);
}
// create new prim using those points
int new_prim = addprim(0, 'polyline', @ptnum, found_point);
}